This was written for a set of points forming a circle.
Input: Center point, X axis alignment point (used to calculate radius, orientation and starting point), number of circular points.
1) Create a translation matrix from the center point. (4x4 identity with the right most column set to center x, y, z, 1)
2) Calculate the delta between X axis alignment point and center; delta = X_axisAlignmentPoint - centerPoint
3) Use delta to calculate the radius of the circle. radius = sqrt( delta.x*delta.x + delta.y*delta.y + delta.z* delta.z)
4) The x axis quadrant of the circle is a point at radius,0,0. circleXQuad = (radius,0,0) [note: The x value = radius]
5) Create an array of points on a circle, centered at 0,0,0 with a radius from step 3, on the x,y plane.
6) Add the first point of the array to the end of the array to close the circle
7) Find the rotation needed around Z axis in order to put "delta" on the XZ plane [ eliminate the Y value (y = 0)]. Get the angle using arcTan2 of delta. rotation around Z = tan^-1(delta.y / delta.x) [note: arcTan2 should maintain the sign of the angle]
8) Create a Z axis rotation matrix from the angle found in step 7. Lets call it Rz.
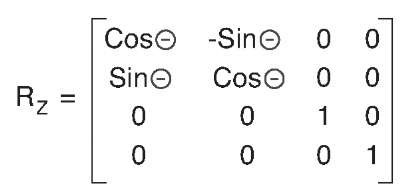
9) Translate delta using the Z axis rotation matrix, Rz. This will create a new point, delta' [delta prime], where the point is radius distance from 0,0,0, but y is zero (delta'.y = 0).
delta' = [Rz][delta]
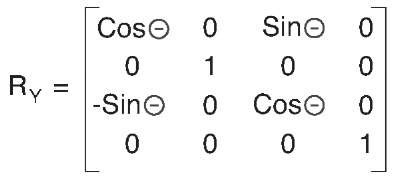
10) Find the rotation needed around the Y axis to put delta' on the X axis. This will make delta'.z = 0. The angle may need to be negative. Rotation around Y = tan^-1(delta'.z/ delta'.x)
11) Build a rotation matrix for Y rotation.
12) The rotation matrices will put the X axis alignment point at the circle's x axis quadrant. The inverse of this is needed to put the circle's x axis quadrant point at the the input X axis alignment point.
Edit 20190905: Multiply the Rz and Ry matricies, then get the inverse of the result.
([Rz][Ry])^-1
(If you get the inverse Rz and Ry first (as I suggested before 20190905), then you need to reverse the order they are multiplied it would be [Ry^-1][Rz^-1]. )
The circle will be rotated to the correct orientation, matching the orientation of the original delta point, but centered at 0,0,0.
13) Move the circle to the input center point using the translation matrix from step 1. Multiply all of the oriented circle points by the translation matrix. The circle will be centered on the input center point.
No comments:
Post a Comment